
 italiano
italiano








 Sistema di montaggio a terra
Sistema di montaggio a terra sistema di montaggio a tetto
sistema di montaggio a tetto
 Sistema di montaggio per posto auto coperto
Sistema di montaggio per posto auto coperto sistema di montaggio dell'azienda agricola
sistema di montaggio dell'azienda agricola
 Easy Solar Kit
Easy Solar Kit sistema di inseguimento solare
sistema di inseguimento solare
 Invertitore solare
Invertitore solare
 Accessori solari
Accessori solari
Linee guida per l'uso dei robot di pulizia fotovoltaici-B30M2
Il robot di pulizia fotovoltaico è semplice e comodo da usare. Impariamo di seguito la sua guida all'uso.
1. Scenari di utilizzo supportati
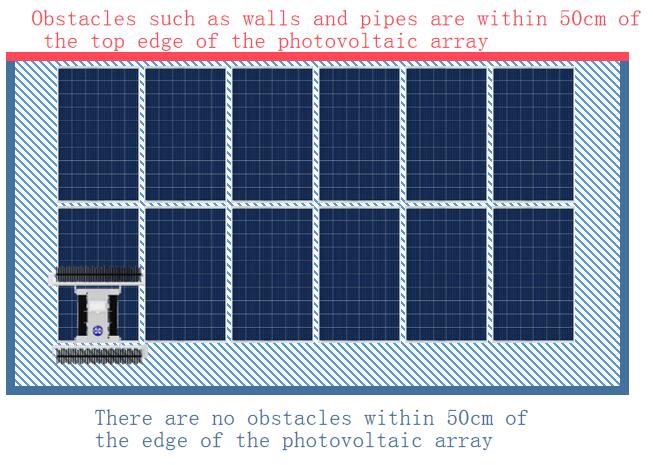
Avviso:
2.1 Controllare prima dell'uso
2.1.1 Verificare la pulizia della superficie del cingolo per evitare una significativa riduzione dell'aderenza. (Vietato sollevare la parte sospesa della parte superiore del binario per evitare che gli assali anteriore e posteriore si deformino e si danneggino)

2.1.2 Controllare se c'è un oggetto estraneo sotto il sensore antigoccia per evitare che il sensore antigoccia sia anormale. (È severamente vietato essere schiacciati da forza esterna)

2.1.3Controllare lo spreco del cotone perlato autopulente, e osservare se il lato del cotone perlato autopulente è vicino alla pista, in modo da evitare che l'aderenza della pista si riduca notevolmente.

2.1.4 Verificare la pulizia della superficie di aspirazione nella parte inferiore della ventosa del gruppo ventosa centrale e assicurarsi che sia pulita per evitare che la forza di presa si riduca notevolmente e pregiudichi la sicurezza di funzionamento.

2.1.5 Controllare la pulizia dell'obiettivo della fotocamera della scatola di esposizione e del relativo corpo della scatola e se il pennello per ombreggiatura copre completamente l'area del piano di proiezione della scatola di esposizione per evitare che la luce solare e la polvere interferiscano con la fotocamera.

2.1.6 Controllare il tipo di gruppo spazzola a rullo e se è deformato per evitare di compromettere l'effetto pulente.

2.2 Selezione del luogo
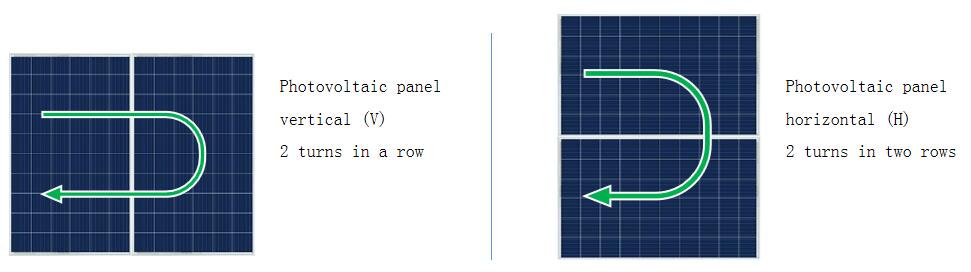
2.2.1(Numero di turni) è uguale a (Numero di turni per riga) moltiplicato per (Numero di righe relative dell'array).
2.2.2Selezionare il dispositivo rivolto verso il lato più lungo (superiore) dell'array fotovoltaico come punto di partenza, in modo da ridurre al minimo il numero di giri nel funzionamento autonomo orizzontale e massimizzare l'efficienza.
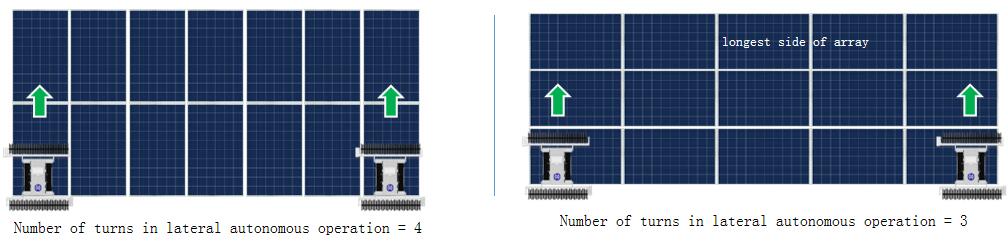
2.2.3 In generale, come estremità iniziale, cioè l'estremità inferiore dell'array, viene utilizzato il lato più comodo per la movimentazione e il funzionamento dell'apparecchiatura.
2.3 Dispositivo di avvio
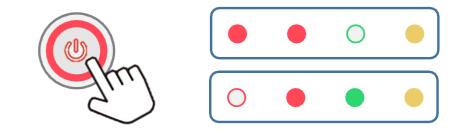
2.3.1 Accensione
Premere il pulsante di accensione per avviare il dispositivo e, quando la prima luce rossa si spegne, il dispositivo è normale ed entra nello stato di inizializzazione.
2.3.2 Taratura della posizione
Regolare l'asse centrale laterale del dispositivo in modo che si allinei con l'interlinea tra le celle nella seconda riga e la terza riga nell'angolo inferiore e allineare l'asse centrale longitudinale con la linea di spaziatura tra le celle nella terza e quarta colonna in corrispondenza dell'angolo inferiore. angolo inferiore.
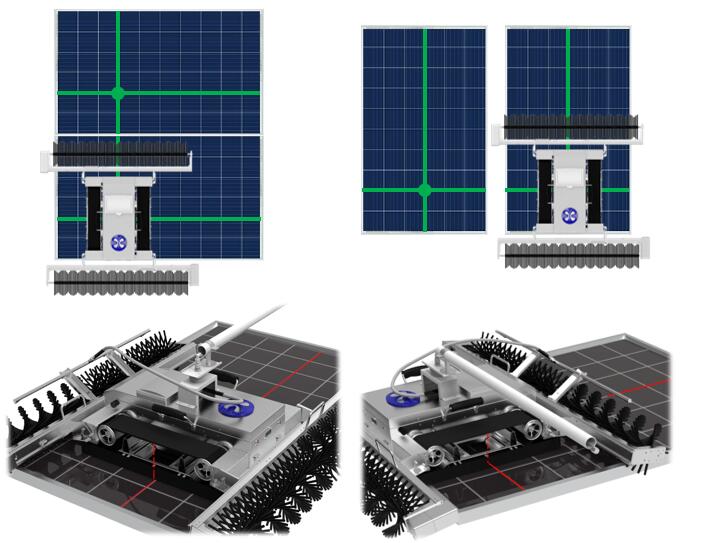
*La piastra di supporto sinistra della ruota di sincronizzazione ha una posizione del foro per indicare la posizione centrale, che può aiutare la calibrazione della posizione.
2.3.3 Iniziare il lavoro
Quando la luce verde è sempre accesa, la luce rossa è sempre spenta (il cicalino suona una volta) e l'inizializzazione è andata a buon fine (circa 22s), è possibile premere il pulsante di avvio/standby per far funzionare il dispositivo in modo indipendente.

2.4 Applicazione funzionale
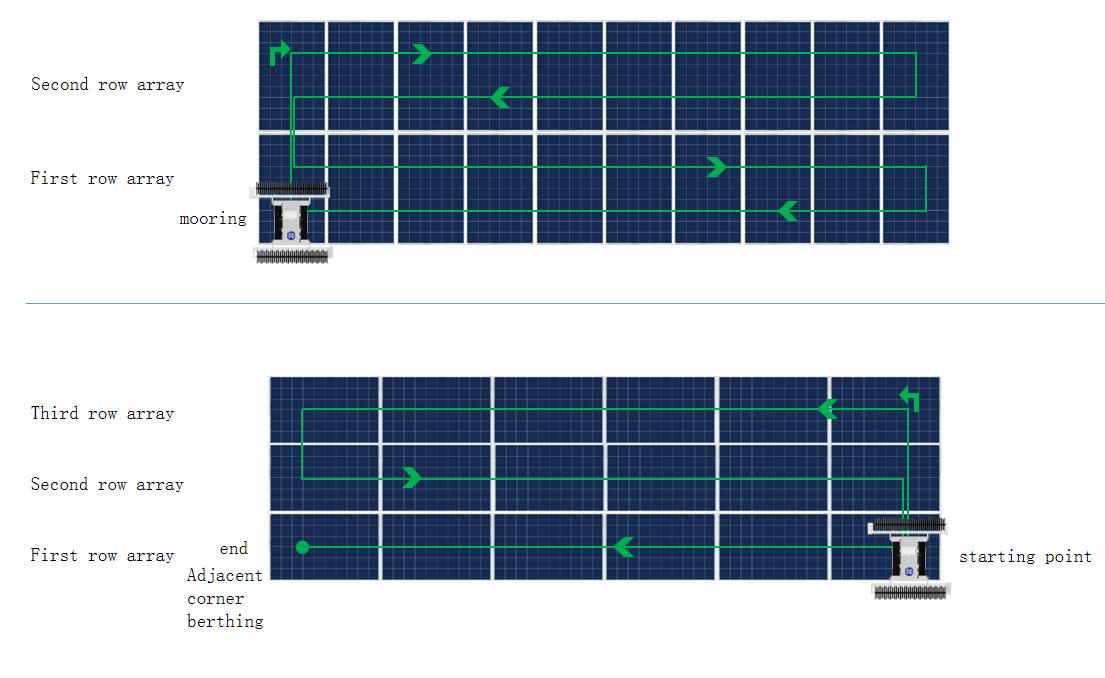
2.4.1 Lavoro autonomo
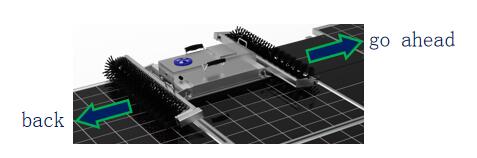
Dopo aver completato l'attivazione e l'identificazione della scena, salire in autonomia fino alla sommità dell'array fotovoltaico e testare la direzione. Dopo aver determinato la direzione, avviare l'operazione laterale, girarsi e camminare su entrambi i lati dell'array fino a coprire l'array e selezionare il punto finale in base alla modalità di parcheggio.
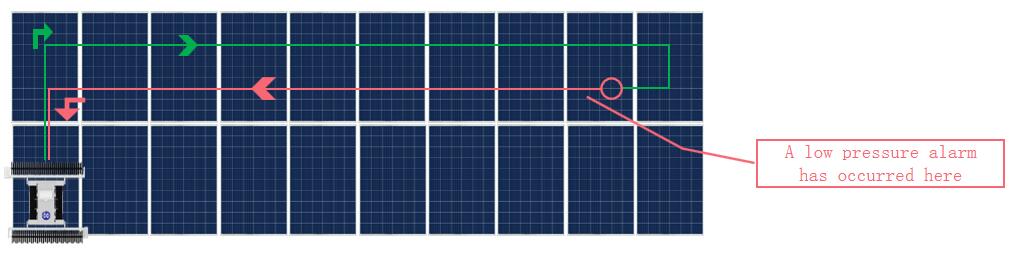
2.4.2 Ritorno a bassa pressione
Quando la carica della batteria è bassa durante il funzionamento autonomo, il dispositivo entrerà automaticamente nella modalità di ritorno a casa a bassa tensione e tornerà alla posizione iniziale.
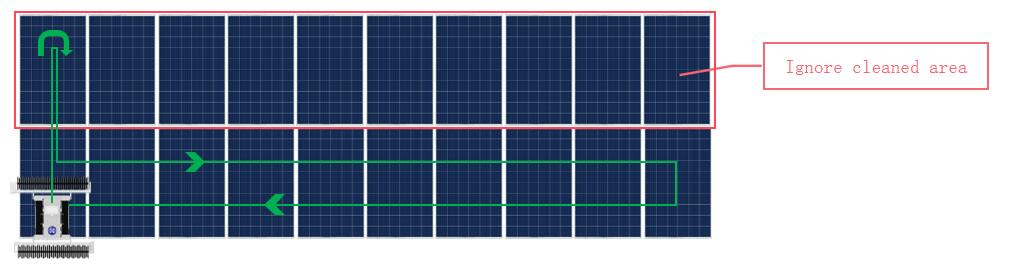
2.4.3 Continuazione del breakpoint
Scegli di saltare parte dell'area pulita in modo indipendente, trova la posizione in cui l'ultimo ritorno a bassa pressione o il pulsante manuale ha interrotto l'operazione e inizia a continuare l'operazione da lì.
Avviso:
2.5.1 Interazione di base
Visualizzazione dello stato del dispositivo e impostazioni di personalizzazione della modalità .

2.5.2 Modalità telecomando
Joystick e modalità pulsante per il controllo manuale del dispositivo
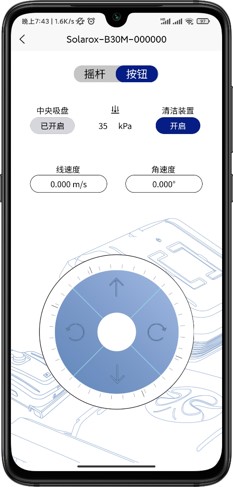
* La modalità di controllo remoto è una modalità diretta con il dispositivo stesso come sistema di coordinate di riferimento.
* invece della modalità headless con un sistema di coordinate geografiche o referenziato dall'operatore.
Categorie
Nuovo blog
Per informazioni sui nostri prodotti o sul listino prezzi, ti preghiamo di contattarci e ti contatteremo entro 24 ore.
 RM502, Sihai Smart Zone, No.189, Fanghu West Road, Huli District, Xiamen, Fujian, China.
RM502, Sihai Smart Zone, No.189, Fanghu West Road, Huli District, Xiamen, Fujian, China.





© Diritto dautore: 2026 Xiamen Wintop New Energy Tech Co., Ltd.. Tutti i diritti riservati.

Rete IPv6 supportata



